
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
2.3.1. Эксперименты с моделями СВП
Буксировки моделей СВП в поле полимерного льда выполнялись с целью получения параметров резонансных ИГВ в узком скоростном диапазоне при глубинах акватории 10 и 20 мм. Для имитации мелководья в чаше бассейна было установлено непроницаемое подвесное дно размерами L´B=8,0´4,0м. Схема расположения оборудования приведена на рис.2.71.
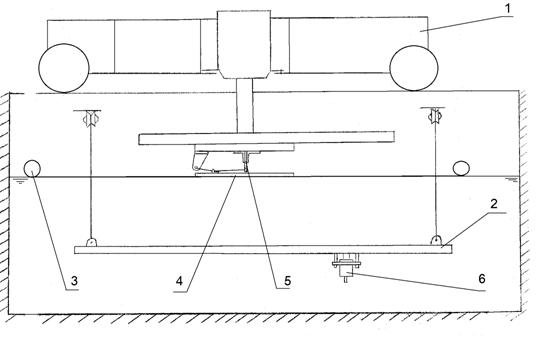
Рис.2.71.Схема расположения оборудования: 1-буксировочная тележка; 2-подвесное дно; 3-модель сплошного льда; 4-модель СВП; 5-тензодатчик для измерения буксировочного сопротивления; 6-датчик гидростатического давления
Для проведения модельных экспериментов были разработана и изготовлена измерительная система регистрации колебаний модельного льда и определения буксировочного сопротивления моделей нагрузки [73]. Измерение буксировочного сопротивления выполнялось тензометрированием (рис.2.71). Регистрация колебаний полимерного льда производилась измерительной системой на основе датчиков гидростатического давления (рис.2.70). Модели СВП представляли собой пластинки различной геометрической формы в плане, общий вид которых показан на рис.2.72 [72, 77] .


Рис.2.72.Общий вид моделей СВП
В первой серии опытов определялась резонансная скорость. Как показали буксировки базовой модели (модели СВП "Скат"), возникновение ИГР в модельном льду характеризовалось максимумом амплитуды ИГВ, а скорость, при которой во льду распространялись волны наибольшей амплитуды, были равны резонансным - vp. Так, значение резонансной скорости при глубине 10 мм составило 0,76 м/с. Буксировки выполнялись как для равномерного движения модели, так и при ее разгоне и торможении. На рис.2.74. показан эпизод буксировки базовой модели СВП по поверхности модельного льда.
|
|
|
|
Рис.2.73.Система запряжки нагрузки - модели СВП (М 1:200) |
Рис.2.74. Фрагмент буксировки базовой модели
|


Во второй серии экспериментов исследовалось влияние удлинения L/B=0,5-4,5 на параметры ИГВ и величину волнового сопротивления. Испытывалась базовая модель и модели прямоугольной формы. Все модели имели одинаковую площадь опорной поверхности и вес. Опытным путем было установлено, что на глубине 10 мм наибольшее волновое сопротивление и амплитуда модельных волн достигались моделями, имевшими удлинение L/B =0,5 и 2,0, хотя в первом случае эти параметры были максимальными. Анализом полученных данных и результатов буксировок в малом бассейне показал их удовлетворительное соответствие [78].
В третьей серии опытов производилась оценка влияния геометрической формы модели на выше названные параметры. Буксировались модели круглой, треугольной и эллипсовидной формы с равными площадями опорной поверхности и весом. Так, максимальное волновое сопротивление и амплитуда ИГВ достигались у спаренной модели (две базовые модели, счаленные бортами). Модели другой конфигурации показали характеристики, незначительно уступавшие базовой модели. Дальнейшие опыты проводились только с базовой моделью [78].
Четвертая серия буксировочных испытаний выполнялась для исследования волнообразования от движения нагрузок друг за другом (в кильватер). Использовались две базовые модели, буксировавшиеся на различных расстояниях друг от друга. Максимальное сопротивление и интенсивность волн были зафиксированы при движении моделей вплотную друг к другу. Также повышенное сопротивление и амплитуда ИГВ были получены при удалении моделей на расстоянии 350 мм друг от друга вследствие интерференции двух волновых систем. При торможении моделей за датчиком наблюдалось возрастание амплитуды волн. При разгоне моделей наибольшая интенсивность волн наблюдалась при старте моделей с дистанции 400 мм перед датчиком перемещений [77].
Пятая серия буксировок проводилась для исследования влияния группового движения нагрузок на характеристики резонансных ИГВ. Для этого две базовые модели двигались параллельными курсами на различных отстояниях друг от друга с резонансными скоростями. Наибольшее сопротивление и амплитуда волн наблюдались при удалении моделей друг от друга на расстоянии 200 мм и 400 мм при глубине 20 мм. При глубине воды 10 мм - 150 мм и 300 мм, соответственно. Очевидно, что модели двигались на расстоянии друг от друга, кратном длине ИГВ [77].
В шестой серии буксировочных испытаний использовалась базовая модель, со способностью совершать периодические вертикальные колебания с частотой 0-14 Гц. Движение проводилось с резонансной скоростью. Было установлено, что наличие вертикальных колебаний в диапазоне 0,5-20 Гц увеличивало амплитуду волны и волнового сопротивления, по сравнению со стационарным режимом движения модели. С ростом частоты колебаний модели происходило уменьшение амплитуды волны и волнового сопротивления. При глубине воды 10 мм существовала узкая полоса частот 0,5-0,7 Гц, при которых достигались максимумы ИГВ и сопротивления, при глубине воды 20 мм - 0,7-2 Гц, соответственно. Полученные значения частот соответствовали критическим частотам резонансных ИГВ, распространявшихся в сплошном льду. На основании результатов проведенных модельных исследований был сделан вывод об удовлетворительной применимости полимерной модели ледяного покрова для имитации волнообразования в ледяном покрове от движущейся нагрузки [78].
Следующий этап модельных исследований ИГВ в неразрушаемом сплошном льду от движения нагрузки проводился с использованием буксировочной системы гравитационного типа на базе опытового бассейна КнАГТУ (рис.2.80). Буксировки модели нагрузки производились с постоянным усилием.
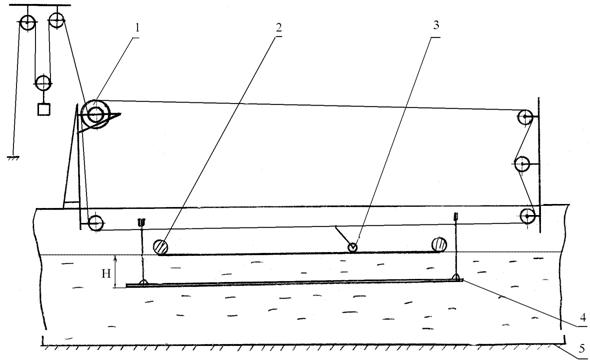
Рис.2.75.Буксировочная система гравитационного типа для испытаний модели СВП в поле полимерного льда: 1-привод; 2- модель сплошного льда; 3- модель нагрузки; 4- подвесное дно; 5- опытовый бассейн
Цель буксировочных испытаний имитационной модели СВП состояла в определении параметров резонансных ИГВ в ледяном покрове при различных скоростях движения нагрузки с их последующим после пересчета на натуру сопоставлением с данными натурных наблюдений [158].
Буксировки модели нагрузки выполнялись с помощью буксировочной системы с электроприводом (рис.2.76). Скорость ее хода определялась электромеханическим способом с применением тахогенератора, который представлял собой электродвигатель, на вал ротора которого было насажено колесо, прижимавшееся к ободу приводного барабана буксировочной системы. Вращением колеса в электродвигателе индуцировалась ЭДС, а в цепи мотор-вольтметр появлялся электрический ток. Чем больше была частота вращения колеса, тем на большую величину перемещалась стрелка вольтметра.
Имитационной моделью СВП был ролик из полиэтилена, соединенный посредством хомута с буксирным тросом. Вес ролика в пересчете на натуру соответствовал водоизмещению СВП пр. 1205 ("Скат").Буксировки ролика производились при различных относительных глубинах акватории H/L=1-3, где L - длина СВП. В опытах определялись значения скоростей, амплитуд и периодов резонансных ИГВ при различных относительных глубинах акватории.

Рис.2.76.Электропривод буксировочной системы
Буксировки ролика по полю модельного льда (рис.2.77)позволили определить значения резонансных скоростей при произвольной глубине воды. С ростом глубины водоема (H/L=0,5-2) происходило увеличение значений резонансных скоростей, начиная с относительных глубин H/L>2 резонансная скорость не изменяла своего значения.
При скоростях движения ролика vp<1 , как показал анализ записей профилей ИГВ, наблюдались деформации сплошного льда, вид которых был подобен статическому прогибу льда под нагрузкой. При vp ³ 1 во льду распространялись ИГВ, видимая длина фронта которых составляла несколько длин ИГВ.

Рис.2.77.Рабочий момент буксировочных испытаний
Влияние торосов на распространение ИГВ в сплошном ледяном покрове исследовалось в ходе проведения серии испытаний ролика (модель СВП) в полимерном льду при различных глубинах акватории. Торосы имитировались лентами из того же материала, что и модельный лед. Они укладывались либо вдоль движения ролика (их количество варьировалось), либо поперек движения модели СВП.
Опыты показали, что поперечная укладка лент (торосов) существенно меньше влияла на распространение ИГВ, нежели продольное их расположение. Это объяснялось тем, что во втором случае жесткость льда была большей, нежели при поперечной укладке лент (торосов).
Дальнейшие исследования ИГВ в ледяном покрове были направлены на моделирование нестационарных режимов движения нагрузки. Буксировки ролика проводились в режиме разгона, когда скорость буксировки увеличивались от резонансного значения с определенным ускорением, и в режиме торможения, когда при движении ролика с резонансной скоростью производилось уменьшение его скорости с заданным ускорением.Также производились буксировки ролика в модельном льду из положения покоя с заданным ускорением и в режиме торможения от зарезонансного значения скорости движения ролика до его полной остановки. Буксировки модели СВП в полимерном льду были выполнены как для глубокой воды, так и на мелководье.
В ходе модельных экспериментов было установлено, что разгон и торможение модели СВП приводили к падению интенсивности волнообразова ния в сплошном льду.

Рис.2.78. Лабораторное оборудование для проведения опытов с полимерной моделью сплошного льда в опытовом бассейне (вид с кормовой стройки)
Как только скорость ролика при буксировке становилась отличной от резонансной, то амплитуда модельных ИГВ уменьшалась, затем волнообразование в модельном льду прекращалось и деформирование ледяного покрова становилось квазистатическим .
Также были выполнены модельные исследования влияния напряжений растяжения в сплошном льду на параметры ИГВ. Для этого особым устройством каркаса модели сплошного льда в модельном льду были создавались растягивающие усилия различной величины. Буксировки ролика в поле модельного льда показали, что наличие растягивающих напряжений в сплошном льду приводило к уменьшению амплитуды ИГВ и росту значения резонансной скорости.
Аналогичным образом было исследовано влияние ограниченности объема акватории озера на характеристики волнообразования. Так, в предельном случае при очень малой глубине воды при движении ролика в модельном льду распространялись волны не характерной малой длины и амплитуды, т.к. поверхность модельного льда превращалась в мембрану, практически не откликавшуюся на действие движущейся нагрузки.
Модель полубесконечного ледяного покрова использовалась при буксировке модели СВП (ролика и водоизмещающей модели) с целью получения характеристик ИГВ в полубесконечном ледяном покрове. Движение моделей производилось как по кромке модельного льда, так и на различных удалениях от нее, как в сторону льда, так и в сторону поверхности воды от линии движения модели (рис.2.79).
Во всех случаях кромка полубесконечного льдяного поля располагалась вдоль линии движения моделей. Поперечное расположение кромки полубесконечного ледяного покрова смоделировать было невозможно из-за конструктивных особенностей модели ледяного поля.
Результаты опытов данной серии носили скорее качественный характер, поскольку конструктивное оформление кромки модельного льда сильно искажало результаты опытов. Опытным путем было установлено, что движение модели СВП по кромке полубесконечного сплошного льда вызывало наибольшее его деформирование при скорости движения, меньше резонансной.
Для модельного льда не соблюдались условиях подобия в отношении плотности льда и его коэффициента Пуассона, но, как показали буксировочные испытания модели СВП, их невыполнение практически не сказалось на результатах моделирования ИГВ в сплошном льду.
Сопоставление результатов модельных экспериментов с данными натурных наблюдений позволило сделать заключение о пригодности вязко-упругой модели ледяного покрова для исследования ИГР в сплошном льду и возможности ее использования в опытах по моделированию деформирования сплошного льда волнами от движения различных объектов [45].

Рис.2.79.Кромка полубесконечного модельного льда