
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
ПРОГРАММИРОВАНИЕ, УПРАВЛЕНИЕ И ЦИФРОВЫЕ МОДЕЛИ ЗАБОЕВ ГАЗОУГОЛЬНЫХ ШАХТ
Жетесова Г. С., Бейсембаев К. М., Нокина Ж. Н., Телиман И. В.,
1.3.4. Имитационное моделирование виртуальных датчиков
Имитация движения тягового органа, происходит с графическим представлением всех основных этапов, включая колебания скребков и цепи. То есть по визуальному отклонению скребков можно, например, судить об амплитуде колебаний.
После имитации движения конечно можно посмотреть график движения выбранного элемента. Но для того, чтобы анализировать траекторию и параметры колебательного процесса необходимы текущие данные. В этом случае можно построить виртуальные датчики для замера, например, угла наклона скребка. Такие методы применяются и в конечно-элементном моделировании. Для создания виртуального датчика в системе Adams следует создать угловой измеритель. Это необходимо хотя бы для того, что бы знать при каком расположении звеньев достигаются экстремальные нагрузки. Для имитации нужно иметь маркеры исследуемых звеньев. В детали из традиционных примитивов маркеры строятся автоматически. Ниже представим особенности построения имитационной модели для измерения углов наклона детали в версии Adams 2017.
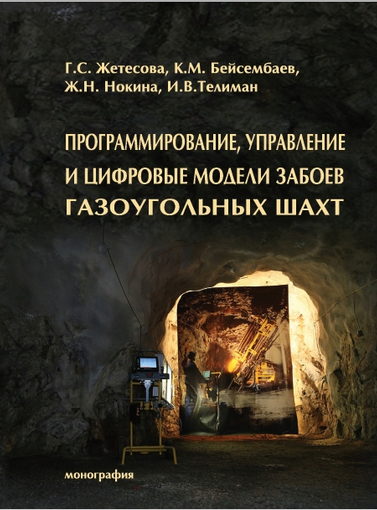
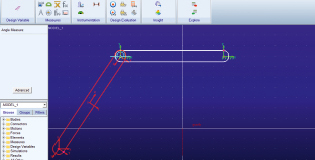
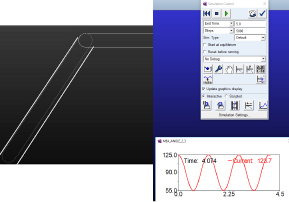
При построении зависимостей усилий в опорах скребкового конвейера их значения следует привязать к положениям механизма, хотя бы для того, чтобы знать при каком расположении звеньев достигаются экстремальные нагрузки. При этом эти данные могут стать необходимыми и для сравнения углов наклона в реальной конструкции (рис. 1.26). Обычные графики, создаваемые в Adams построены во времени. Поэтому создадим «Датчик углов», что позволяет для оси времени построить дополнительную ось углов наклона того или иного звена. Рассмотрим простой случай. Пусть имеем звено, созданное примитивом Link, которое закреплено к основанию (Grund) (рис. 1.27). В начале выполняем имитацию движения модели, затем выбираем меню Design Exploration, а там пиктограмму транспортир, в открывшемся окне нажимаем кнопку Advanced (a), далее выбираем три точки обозначая угол, для замеров датчиком (б). Это завершается выходом окна, с графиком изменения отмеченного угла (рис. 1.28).
При имитации, значение угла наклона звена синхронно с показанием текущего значения положения звена. Движение скребков (рис. 1.31, 1.32) непосредственно с обеих сторон границы характеризуется колебаниями одного знака. Для следующих скребков это сохраняется, но частота колебаний резко уменьшается. Эти графики для проекции на ось Y имеем только для первого скребка, а для остальных они вырождаются. То есть у стыка состояние неустойчивости скребков существенно возрастает. Причем максимальные опорные усилия на первом скребке и достигают 1000 н, то есть 100 кг против 7900 н тягового усилия, что составляет до 13 %.
а
б
Рис. 1.27. Схема задачи: а – после выбора пиктограммы транспортир в меню DesignExploration, стрелка показывает нажатие кнопки; б – 1, 2, 3 – последовательный выбор точек 1, 2, 3 и предельные углы колебаний
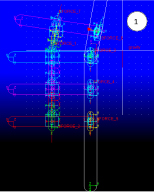
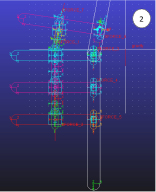
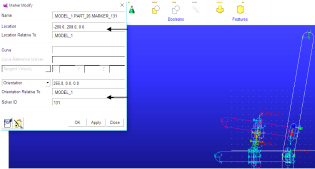
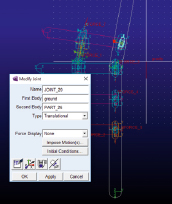
При выполнении конструкции с возможностью отрыва от борта, как показывает анализ малых физических моделей, нагрузка на скребки относительно стабилизируется. Его максимальное значение уменьшается, и при равенстве 10 % от тяговой, составит на скребок 500 кг. На рис. 1.29 показано получение информации о выделенных элементах поступательной (позиция «а» Translational Joint) и вращательного («б» Revolute Joint) шарниров, которая необходима для анализа графиков усилий, скоростей и ускорений. На рис. 1.30, 1.31 возможности корректировки положения шарниров, за счет ввода в окна новых данных для линейных и угловых координат и др., а также усилий тяги и натяжения.
а
б
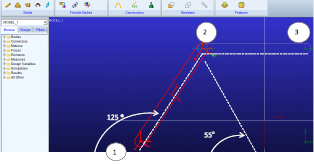
Рис. 1.28. Работа датчика углового измерителя: а – появление графика; б – текущие показания угла при движении звена
а б
Object Name: .MODEL_1.JOINT_20
Object Type: Translational Joint
Parent Type: Model
Adams ID: 20
Active: NO_OPINION
I Marker: .MODEL_1.ground.MARKER_118
J Marker: .MODEL_1.PART_24.MARKER_119
Initial Conditions
Displacement: NOT SET
Velocity: NOT SET
Object Name: .MODEL_1.JOINT_21
Object Type: Revolute Joint
Parent Type: Model
Adams ID: 21
Active: NO_OPINION
I Marker: .MODEL_1.PART_23.MARKER_120
J Marker: .MODEL_1.PART_24.MARKER_121
Initial Conditions
Angular Displacement: NOT SET
Angular Velocity: NOT SET
Object Name: .MODEL_1.SFORCE_6
Object Type: Single_Component_Force
Parent Type: Model
Adams ID: 6
Active: NO_OPINION
I Marker: .MODEL_1.PART_23.MARKER_122
J Marker: .MODEL_1.ground.MARKER_123
Length: None
Mode: Translational
Actiononly: TRUE
Function: –280
Object Name: .MODEL_1.SFORCE_3
Object Type: Single_Component_Force
Parent Type: Model
Adams ID: 3
Active: NO_OPINION
I Marker: .MODEL_1.PART_6.MARKER_92
J Marker: .MODEL_1.ground.MARKER_93
Length: None
Mode: Translational
Actiononly: TRUE
Function: –280
в
Рис. 1.29. Выделение связей и получение информации от них: а, б – выделен ползун 29 и шарнир 21; в – информация о типе шарниров в опорах и сил 6 тяги и 3 – натяжения
а
б
Рис. 1.30. Возможности построения элементов модели: корректировки ползуна по положению маркера 131: а – стрелка вверху – линейные координаты; стрелка внизу – угловые координаты; б – после корректировки – характеристики обновленной поступательной связи
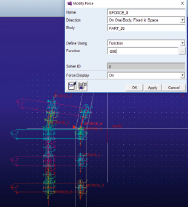
Рис. 1.31. Корректировки сил для проверки и соответствия знаков сил, имитирующих трение и направление движения ползуна
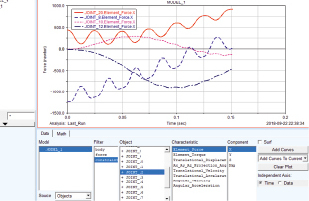
Рис. 1.32. Опорные реакций в откорректированной модели
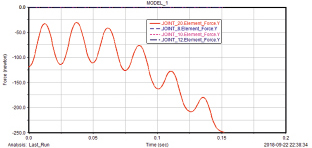
Рис. 1.33. Опорные реакции по оси Y